Introducción
Este proyecto consiste en la realización de una simulación de una celda robotizada cuyo objetivo es realizar la soldadura de cuadros de bicicletas.
Descripción del proceso
La soldadura de los cuadros de bicicletas es realizada por dos robot KUKA KR16. Dichos cuadros de bicicleta serán cargados en un eje externo y una vez esté cargado el cuadro el robot comenzará la secuencia con los diversos puntos de soldadura. Una vez la secuencia de soldadura haya finalizado se deberá retirar el cuadro ya soldado y colocar uno nuevo para dar comienzo al proceso de nuevo.
Elementos utilizados
2 Robots KUKA KR16

1 KRC4 encargado del control de los elementos de la celda

1 KPF3: un eje externo encargado de sostener los cuadros de las bicicletas y su posicionamiento

2 Antorchas de soldadura MIG-MAG que estarán acopladas a los robots

Sistemas de seguridad
PLC de seguridad: encargado de controlar el funcionamiento y las entradas y salidas de los robots y la celda en general que pueda detener el proceso en caso de detectar algún tipo de anomalía

Barrera fotoeléctrica: encargada de detener el proceso en caso de que alguien cruce al interior de la celda durante el funcionamiento de la misma

Paneles de seguridad: evitan posibles daños producidos por el daño que puede causar a la vista la soldadura o por su emisión de residuos.

Panel de control: permite al operario encargado del control de la celda el llevar a cabo manualmente una parada de emergencia en caso de ser necesario, así como el rearme de a misma.

Baliza de señalización: emite una señal visual para informar de que se ha producido un fallo o algún tipo de parada de emergencia.

FUNCIONAMIENTO DE LA CELDA

Inicialmente un operario deberá entrar en la celda y cargar, de forma manual, el cuadro de la bicicleta en el eje externo. Una vez el cuadro se encuentre colocado en el eje externo y el operario se halle fuera de la celda comenzará la secuencia de soldadura. Dicha secuencia consistirá en la realización de diversos cordones de soldadura por parte de ambos brazos robóticos. Una vez finalizados los primeros cordones el eje externo rotará el cuadro de bicicleta para que los brazos, nuevamente, realicen cordones de soldadura en otras zonas distintas. Por último el eje externo rotará una vez mas para realizar los últimos cordones de soldadura y, una vez se hayan finalizado estos, el eje situará el cuadro de la bicicleta en la zona de recogida.
Finalmente el operario responsable de dicha celda entrará de nuevo para descargar el cuadro de bicicleta ya soldado y, de nuevo, cargar uno nuevo. Tras esto se repetirá el proceso de soldadura.
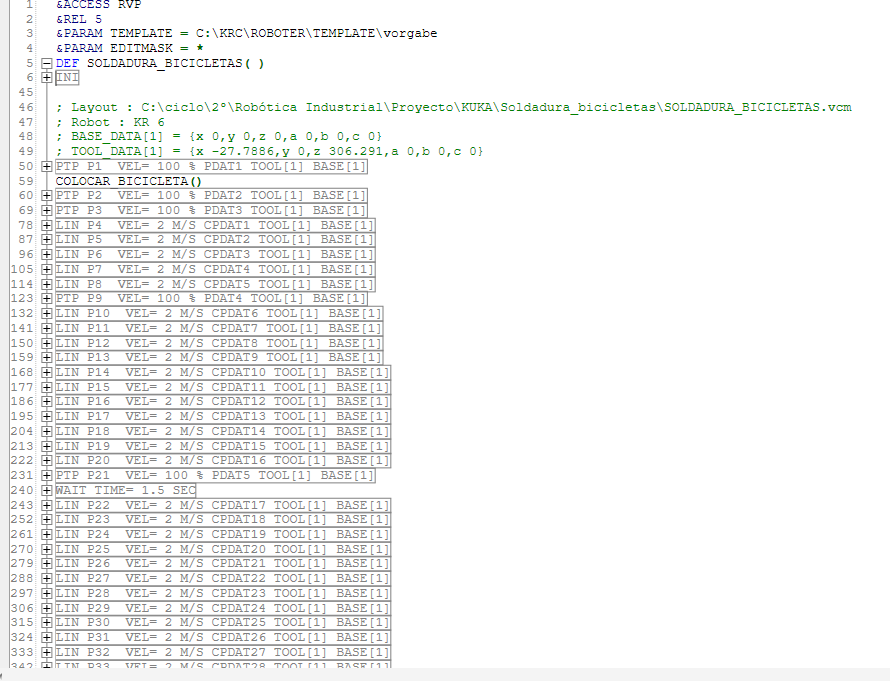
PROGRAMACIÓN DE LA CELDA

SIMULACIÓN DE LA CELDA
ARCHIVOS
No hay comentarios:
Publicar un comentario